
Project
Oct 2024 - Aug 2025 | RoboMaster Competition: Autonomous Sentry Robot Control Systems
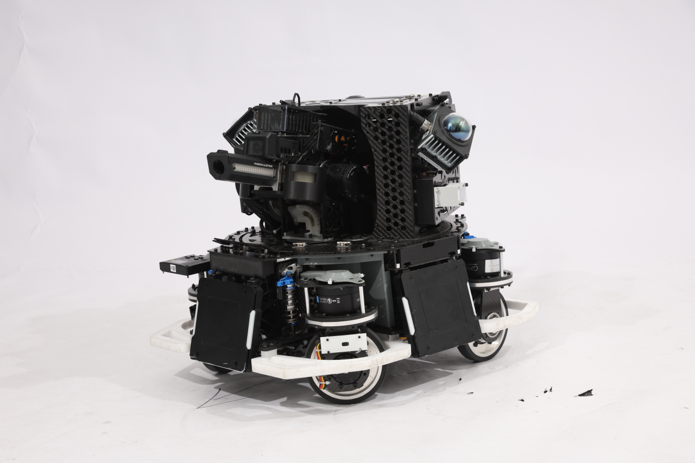
Spearheaded the full-stack system architecture for Sentry Robot. Responsibilities spanned from foundational hardware engineering (circuit design and soldering) to high-level software implementation, establishing a low-latency system for autonomous host command execution. Deployed classical control algorithms (PID and LQR) on the physical robot; Establishing state-space models, successfully suppressed dynamic oscillations in the Coarse-Fine Dual-Yaw gimbal and significantly improved tracking accuracy. This experience bridged the gap between theoretical modeling and engineering practice, solidifying my embedded programming foundation while deepening my passion for advanced robot control research.

Sentry Robot In Action
Aug 2025 - Present | RoboMaster Competition: Vision-Based Guided Dart System
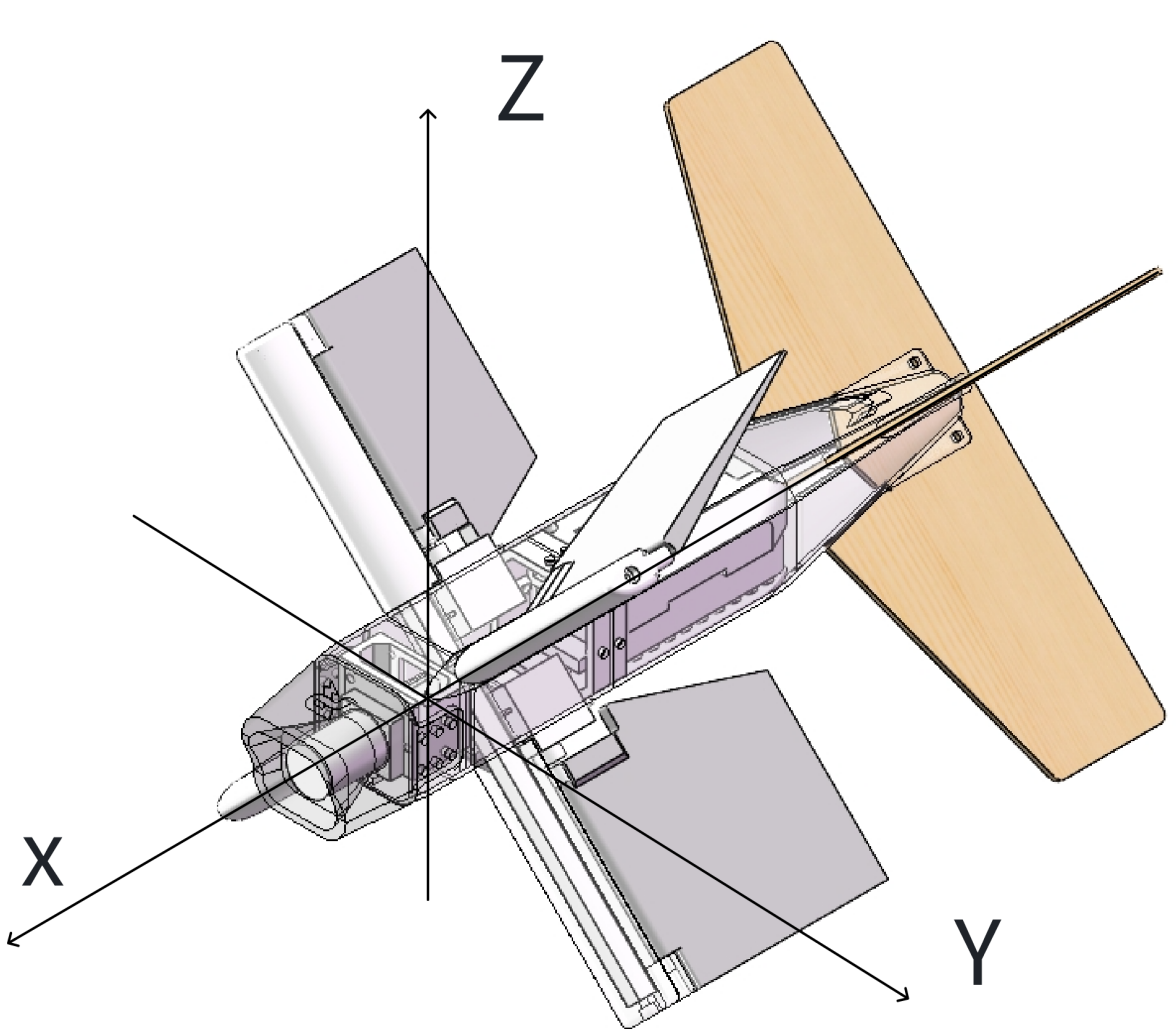
Contributed to the GNC architecture for a Precision-Guided Dart System. Responsibilities spanned from hardware integration to computer vision deployment, establishing a real-time loop for autonomous target acquisition. Deployed aerodynamic control algorithms and Proportional Navigation, successfully transitioning the system from static open-loop ballistics to active terminal homing. Currently advancing the platform by integrating active ducted-fan propulsion and Stereo VIO to enable active loitering capability and enriched sensory feedback, thereby significantly extending the effective guidance range. Significantly refined my capability to model and control complex dynamic systems, honed practical computer vision skills.

Dart System In Action
Oct 2024 - Present | HW-Components: Universal Robot Control Library
As a Core Contributor, architected a high-performance communication framework leveraging C++ template metaprogramming to automate protocol ID allocation. Implemented multi-rate scheduling, enabling precise frequency division and sequenced transmission for diverse data streams. Furthermore, developed an energy-model-based algorithm that dynamically regulates torque output relative to supercapacitor status and competition power limits, maximizing maneuvering agility and energy utilisation efficiency. Enhanced my engineering mindset and templated programming capabilities.