
Research
June 2025 - Present | Multi-Robot Coordination under Temporal Logic Constraints
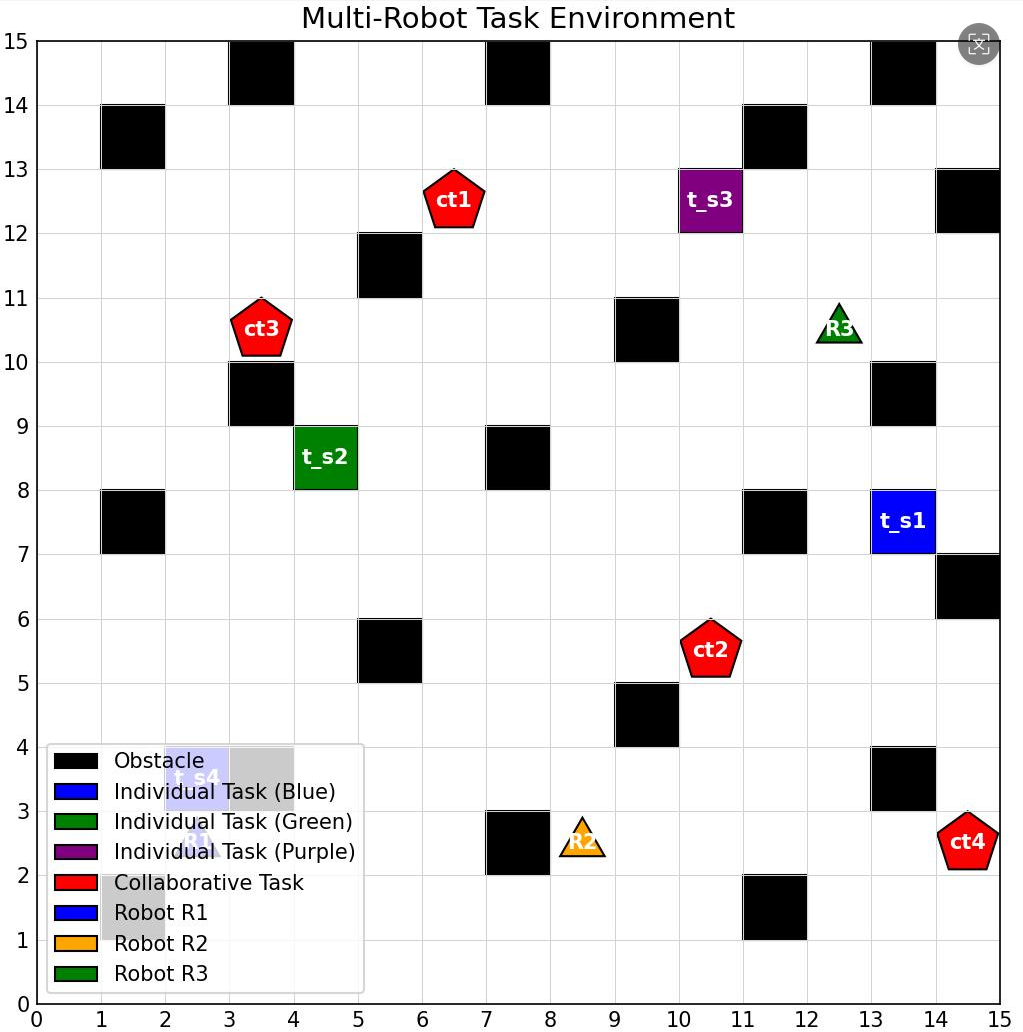
Analyzed the Linear Temporal Logic (LTL) framework to master formal modeling methods for complex sequential tasks. Reproduced SMT-based algorithms to understand the optimization mechanism for minimizing collaborative waiting times. Conducted simulation experiments to validate the logical correctness of coordination strategies. Gained foundational understanding of neural networks and reinforcement learning for dynamic robot control applications. Enhanced practical proficiency in simulation, algorithmic modeling, and implementation using Python and PyTorch.
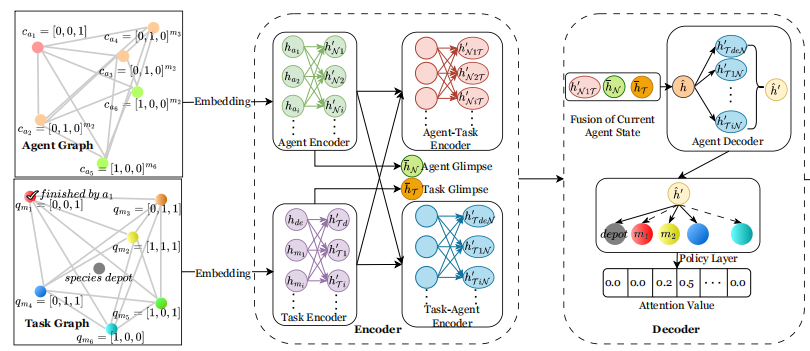
Multi-Robot Coordination Strategy
June 2024 - Sep 2024 | Research Intern @ HICAI-ZJU
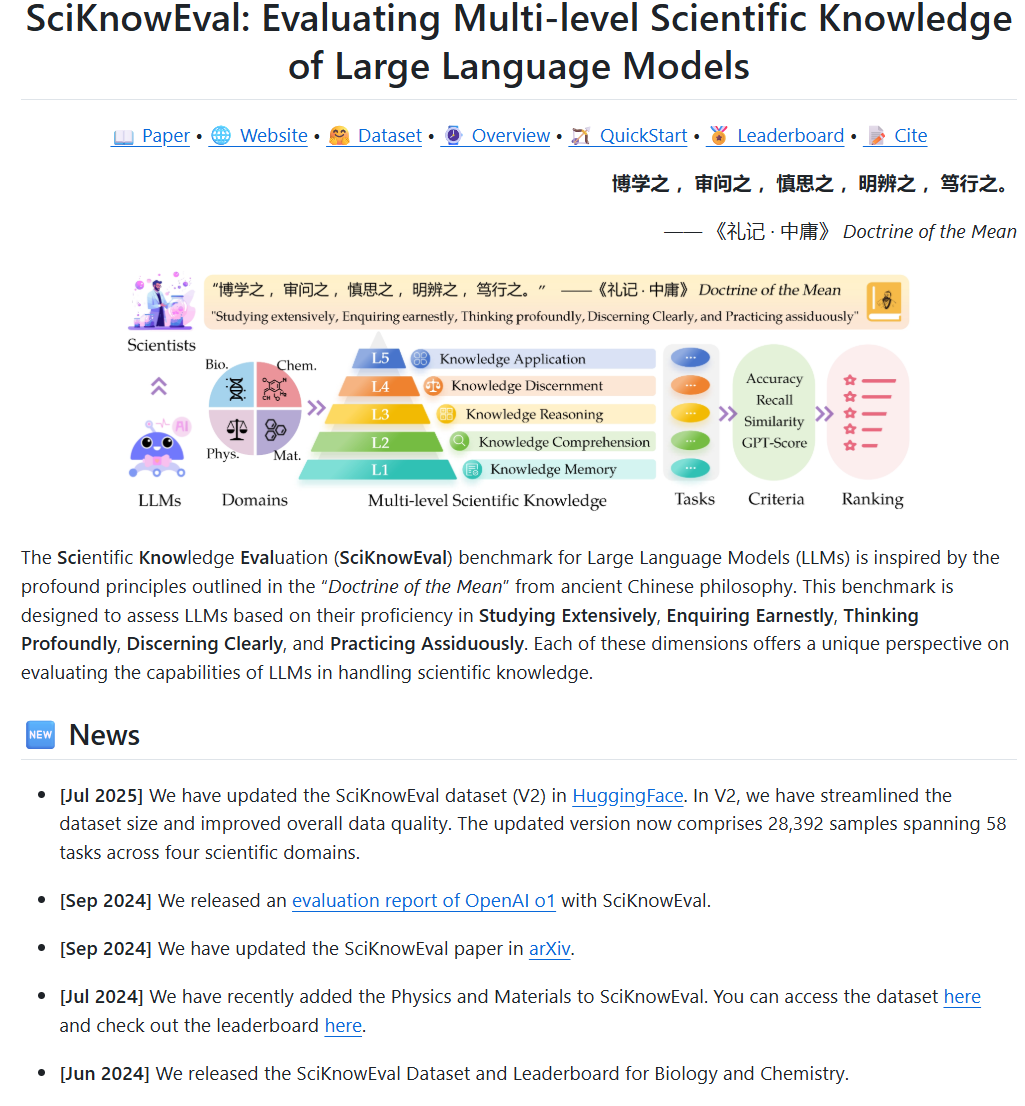
Analyzed LLM limitations, specifically identifying hallucinations and reasoning errors in medical QA tasks. Structured 50k+ data samples using Python, ensuring high-quality formatting for model benchmarking. Accelerated inference by self-learning asyncio, resolving API rate limits and latency for large-scale evaluation. Refined system prompts to enhance model accuracy on complex reasoning and safety judgment tasks. Executed full research workflow, from defining scientific taxonomies to performing quantitative analysis. https://github.com/HICAI-ZJU/SciKnowEval